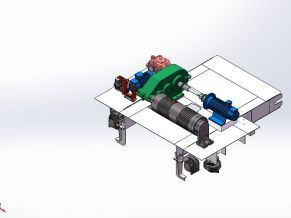
总装图
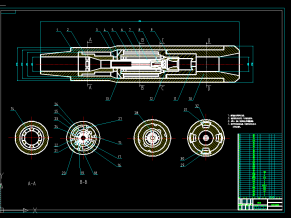
研究设计了机器人的吸附机构、驱动机构、传动机构和清洗机构。针对机器人在水下作业的特点,研究设计了机器人携带的作业工具即水下清刷作业装置。该装置由异步电动机驱动,通过齿轮传动,带动钢丝刷旋转来完成对船体表面的清刷作业。
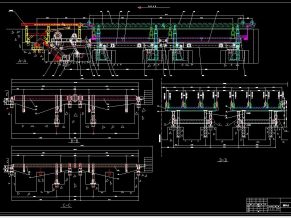
底座
进给系统
箱体
移动部分
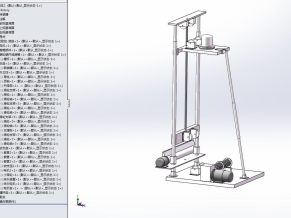
文件明细
字数统计
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至:



























")

")
