

装卸刀手手臂和手部结构2
随着现代科技的发展,机器人技术已广泛应用于人类生活的各种领域,近年来,随着电子技术特别是电子计算机的广泛应用,机器人的研制和生产已成为高技术领域内迅速发展起来的一门新兴技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。因此,一些发达国家不惜投入巨资进行研究开发。日、美、英等国都在研制机器人方面做了大量的工作,并已取得突破性的进展。1997年,日本本田公司率先研制出第一台拟人步行机器人样机,美国麻省理工学院研制出了拟人机器人科戈(COG),德国和澳洲共同研制出了装有52个汽缸,身高2米、体重150公斤的大型机器人。今年11月,日学技术振兴事业团宣布,已开发成功可模仿1岁婴儿行走的机器人“皮诺”。它全身有26个关节,脚心装有一个传感器,可测量重心;眼睛可分辨红、蓝、黄等颜色,可自测距离;能挥手,并能缓缓行走。我国也在这方面作了很多工作,国防科技大学、哈尔滨工业大学研制出了双足步行机器人,北京航空航天大学、哈尔滨工业大学、北京科技大学研制出了多指灵巧手等。
我的设计选择的题目是“卧式加工中心的机械手―装、卸刀手手臂和手部结构” ,此课题主要实现机械手装、卸刀手自动换刀的目的。
由于时间仓促和作者的知识水平有限,中的错误和不足在所难免,请各位老师给予批评指正。

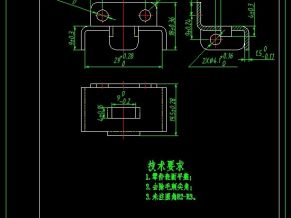
挡块-A型

固定手指
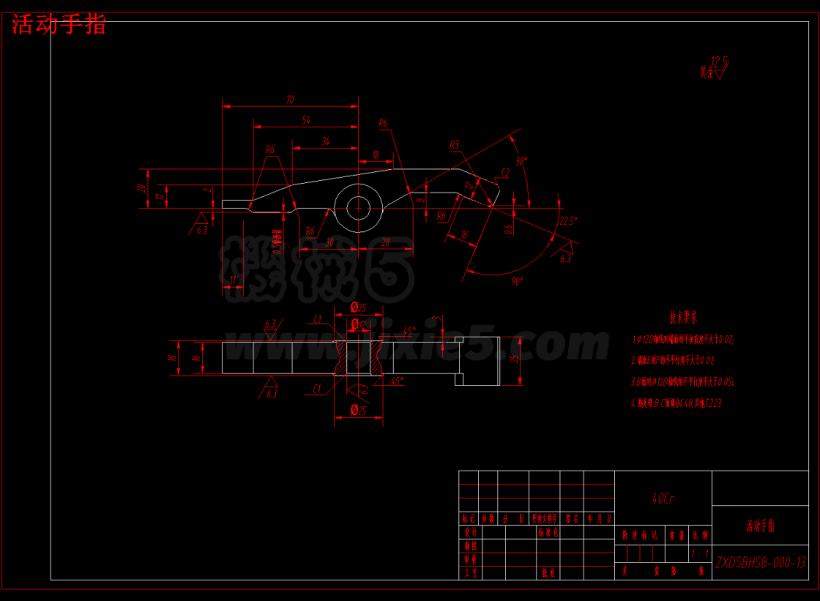
活动手指

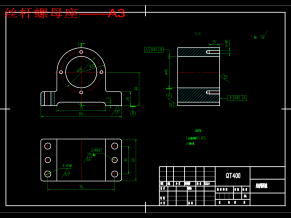
手指座

液压图-A2
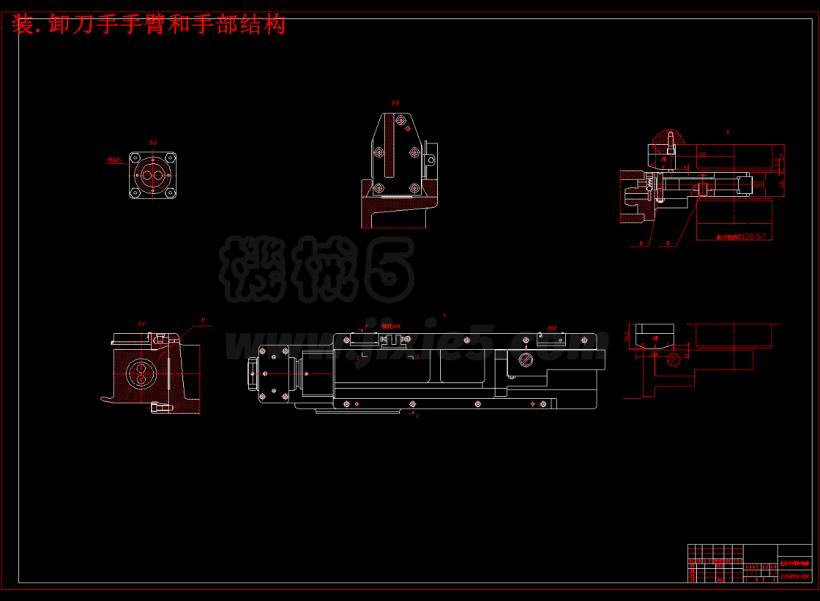
装.卸刀手手臂和手部结构
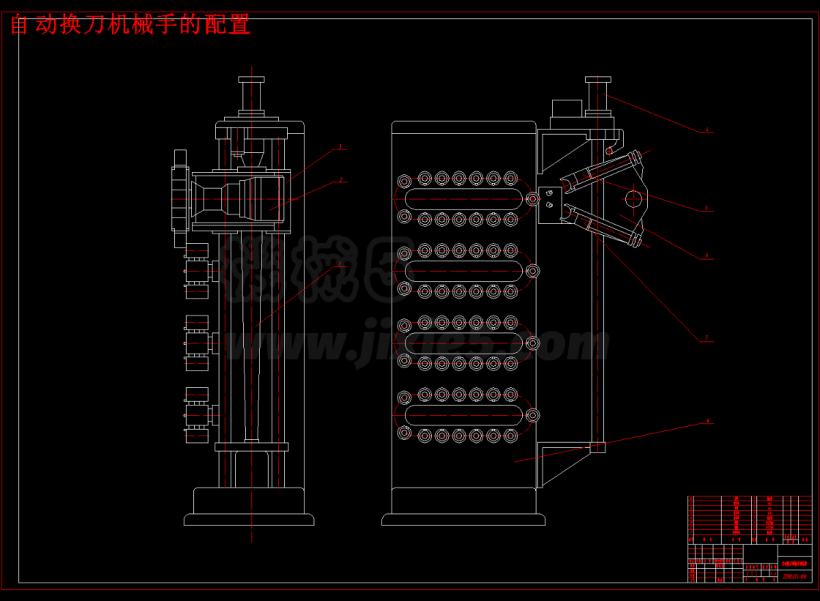
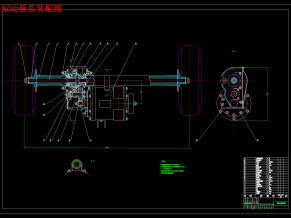
自动换刀机械手的配置
全部文件
字数
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!















的机械加工工艺规程设计含CAD图+说明书")







