

主装配体
(全套带图)管道爬行器的研究与设计(含全套CAD图纸)
摘要
本课题是在对管道爬行器的结构和运动研究分析的基础上。本次设计在Solidworks的基础上构建管道爬行器的若干套三维造型,然后依据要求进行选择。最终方案采用列车连接结构,伸缩结构和“杀型结构,以适应管道内部的弯道和大范围内径变化管道。通过电气控制,使各电机顺序动作以完成通过十字型和丁字型等较复杂的管道,通过新型吊环的调节始终保持摄像装置与水平面的平行。对管道爬行器的控制要求,采用常规的电气控制分析方法设计电气部分的控制电路,最终方案采用人工控制电机的顺序动作进行管道内的转弯,里程计反馈信息与管道工程图相结合的方法来进行爬行器的定位。为研究管道爬行器打下了一定的基矗
目录
1绪论1
2设计方案初步分析2
2.1无线控制与有线控制的选择2
2.1.1有线控制及拖拽2
2.1.2非拖曳2
2.2驱动方式选择2
2.2.1轮式爬行2
2.2.2履带爬行3
2.3姿态调整的选择3
2.3.1加传感器的关节进行调整3
2.3.2利用吊篮方式进行调整4
2.3.3采用新式吊篮进行调整4
2.4自适应分析4
2.4.1伸缩臂长和加弹簧方式5
2.4.2伸缩臂长和“杀型摇杆5
2.5方案的基本确定5
3方案一的设计与分析5
3.1机身的设计6
3.2机腿的设计6
3.2.1伸缩单元7
3.2.2变长单元8
3.2.3关节单元8
3.3驱动轮的设计8
3.4方案一的分析9
4方案二的设计与分析9
4.1机身的设计9
4.2机身内部传动结构设计9
4.3进给螺杆与螺母的设计10
4.4吊篮的设计10
4.5机腿的设计11
4.6方案二的分析11
5方案三的设计与分析12
5.1机身的设计12
5.2机身内部传动机构的设计13
5.2.1进给丝杠和螺母的设计13
5.2.2选择联轴器17
5.2.3选择键17
5.3吊环的设计18
5.4轴承的设计18
5.5机腿的设计19
5.6驱动轮的设计19
5.7管道爬行的实现20
5.8管道内路口转弯的实现20
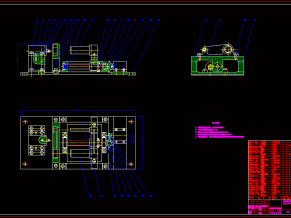
5.9总体装配体设计21
6管道爬行机器人的功能分析21
7管道爬行机器人的动作分析22
8电气控制基本元器件的选取22
8.1电机的参数计算与选取22
8.1.2驱动轮电机的参数计算22
8.1.3主电机参数计算23
8.1.4机器人动力源的选取24
8.2电源的选取24
8.3电机调速元件的选取25
8.3.1串联电阻调速方法的实现25
8.3.2新型调节脉宽PWM型调速的实现26
8.3.3电机调速方法的确定及元件的确定27
9电路设计28
9.1轮足电机动作的正转与反转的电路设计28
9.2前后伞足的张开闭合电路设计28
9.3电机部分总电路设计29
9.4电机顺序动作的电路设计30
9.4.1人为控制30
9.4.2逻辑控制30
9.4.3单片机/PLC进行自动控制31
9.5照明系统的电路设计32
9.6管道内机器人定位系统(PDPS)的设计33
9.6.1爬行器管道内定位方案的提出与分析33
9.6.2机器人定位系统部件的选择与设计35
10结论36
11结束语37
致谢38
参考文献38

电机座

螺母杆

曲柄

伸缩杆1

伸缩杆2

丝杆

小电机座












潘行莉-喷浆机械手的研究与设计(含cad图纸)")
")
")
")


")
")
")
")