

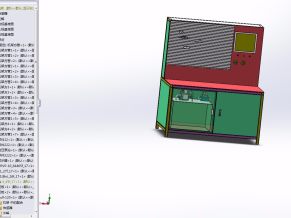
三维截图
目录
绪论1
1.课题的来源与研究的目的和意义2
1.1本课题研究的内容3
1.2机械手概述2
1.3机械手的组成和分类2
1.3.1机械手的组成2
1.3.2机械手的分类2
1.4 Solidworks设计基础6
1.4.1草图绘制7 1.4.2基准特征,参考几何体的创建10 1.4.3拉伸、旋转、扫描和放样特征建12 1.4.4工程图的设计12 1.4.5装配设计12
2.轿车车门装配机械手结构的设计12
2.1轿车车门装配机械手总体方桉图12
2.2轿车车门装配机械手的工作原理13
2.3车门装配机械手的功能特点13
2.4机械传动部分的设计计算14
2.4.1真空吸盘的选型计算15
2.4.2气缸的选型计算17
2.4.3轴承的选型计算17
2.5方管强度的校核计算19
2.6轴承强度的校核计算20
2.7主臂回转力矩的计算20
2.8主臂气缸的选型计算20
2.9四杆机构的选型计算20
3.轿车车门装配机械手中主要零件的三维建模22
3.1立柱的三维建模24
3.2前臂的三维建模26
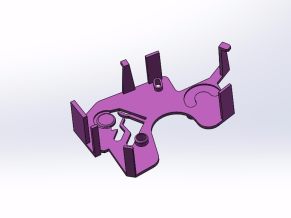
3.3车门装配夹具的三维建模27
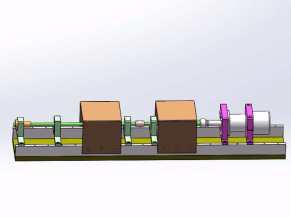
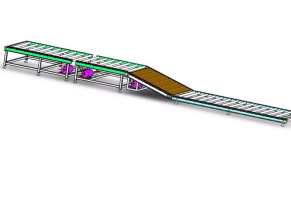
3.4轿车车门装配机械手的三维建模28
4.机械手的PLC控制系统设计30
4.1可编程控制器的选择31
4.2可编程控制器的使用步骤32
5.三维软件设计总结33
结论34
致谢35
参考文献36
执行机构
包括手部、主臂、手臂和立柱等部件,有的还增设行走机构。
1、手部
即与物件接触的部件。由于与物件接触的形式不同,可分为夹持式和吸附式手在本课题中我们采用夹持式手部结构。夹持式手部由手指(或手爪)和传力机构所构成。手指是与物件直接接触的构件,常用的手指运动形式有回转型和平移型。回转型手指结构简单,制造容易,故应用较广泛。平移型应用较少,其原因是结构比较复杂,但平移型手指夹持圆形零件时,工件直径变化不影响其轴心的位置,因此适宜夹持直径变化范围大的工件。手指结构取决于被抓取物件的表面形状、被抓部位(是外廓或是内孔)和物件的重量及尺寸。常用的指形有平面的、V形面的和曲面的:手指有外夹式和内撑式;指数有双指式、多指式和双手双指式等。而传力机构则通过手指产生夹紧力来完成夹放物件的任务。传力机构型式较多时常用的有:滑槽杠杆式、连杆杠杆式、斜面杠杆式、齿轮齿条式、丝杠螺母弹簧式和重力式等。
2、主臂
是连接手部和手臂的部件,并可用来调整被抓取物件的方位(即姿势)
3、手臂
手臂是支承被抓物件、手部、主臂的重要部件。手臂的作用是带动手指去抓取物件,并按预定要求将其搬运到指定的位置.工业机械手的手臂通常由驱动手臂运动的部件(如油缸、气缸、齿轮齿条机构、连杆机构、螺旋机构和凸轮机构等)与驱动源(如液压、气压或电机等)相配合,以实现手臂的各种运动。
4、立柱
立柱是支承手臂的部件,立柱也可以是手臂的一部分,手臂的回转运动和升降(或俯仰)运动均与立柱有密切的联系。机械手的立I因工作需要,有时也可作横向移动,即称为可移式立柱。
5、行走机构
当工业机械手需要完成较远距离的操作,或扩大使用范围时,可在机座上安滚轮式行走机构可分装滚轮、轨道等行走机构,以实现工业机械手的整机运动。滚轮式布为有轨的和无轨的两种。驱动滚轮运动则应另外增设机械传动装置。
6、机座
机座是机械手的基础部分,机械手执行机构的各部件和驱动系统均安装于机座上,故起支撑和连接的作用。
(二)驱动系统
驱动系统是驱动工业机械手执行机构运动的动力装置调节装置和辅助装置组成。常用的驱动系统有液压传动、气压传动、机械传动。控制系统是支配着工业机械手按规定的要求运动的系统。目前工业机械手的控制系统一般由程序控制系统和电气定位(或机械挡块定位)系统组成。控制系统有电气控制和射流控制两种,它支配着机械手按规定的程序运动,
并记忆人们给予机械手的指令信息(如动作顺序、运动轨迹、运动速度及时间),同时按其控制系统的信息对执行机构发出指令,必要时可对机械手的动作进行监视,当动作有错误或发生故障时即发出报警信号。
(二)控制系统
控制系统是支配着工业机械手按规定的要求运动的系统。目前工业机械手的控制系统一般由程序控制系统和电气定位(或机械挡块定位)系统组成。控制系统有电气控制和射流控制两种,它支配着机械手按规定的程序运动,并记忆人们给予机械手的指令信息(如动作顺序、运动轨迹、运动速度及时间),同时按其控制系统的信息对执行机构发出指令,必要时可对机械手的动作进行监视,当动作有错误或发生故障时即发出报警信号。
(四)位置检测装置
控制机械手执行机构的运动位置,并随时将执行机构的实际位置反馈给控制系统,并与设定的位置进行比较,然后通过控制系统进行调整,从而使执行机构以一定的精度达到设定位置.

A0-装配图

A1-操作架

A1-立柱

A1-前臂

A1-竖臂

A2-定位块

A3-安装座

A3-连接套

图纸合集

A0-车门装配夹具

A0-后臂
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!









")
")
")





