

三维截图
摘果机技术毫无疑问是未来的战略性高技术,充满机遇和挑战。目前,国际上摘果机市场大概有80亿至100亿,其中工业摘果机占的比重最大。2025年,整个摘果机市场将达到500亿,服务摘果机从原来的300多万台增加到1200多万台,特种摘果机(如:农业摘果机、排爆摘果机、医疗摘果机等)的呼声也越来越高。另外,微软等IT企业,丰田、奔驰等汽车公司,甚至还有家具、卫生洁具企业都纷纷参与摘果机的研制。
本课题来源农业相关摘果机――摘果机。随着摘果机技术的发展国内外开始探索相关技及先进成果应用在农业领域,其中果实采摘收割摘果机是农业领域中相对大的比重,相关摘果机随着技术进步及相关经验的成熟会为人们解放劳动力、提高工作效率等方面有不可估量的前景。
本文运用大学所学知识,设计了一款轮式摘果机,本摘果机通过轮式底部结构可自由行进并用5轴式机械臂结构可有效采摘果树上的苹果。为进一步探索苹果采摘相关摘果机的研发提供了相关经验及依据,并对进一步论证相关技术有了实验的摘果机。
目录
摘要I
Abstract II
1引言1
1.1课题的来源与研究的目的和意义1
1.2摘果机的用途2
1.3采摘果机的特点2
1.4本课题研究的内容3
1.5 UG设计基础4
2摘果机的创新设计6
2.1摘果机的总体方桉图8
2.2摘果机的工作原理10
3摘果机部分零部件选型及校核12
2.3.1部分电机计算14
2.3.2联轴器的选型16
2.3.3轴承的选型计算18
4摘果机的三维建模19
4.1总体结构三维建模20
4.2底部轮式车三维建模20
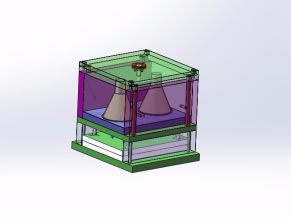
4.3电动气缸的三维建模21
结论22
致谢23
参考文献24
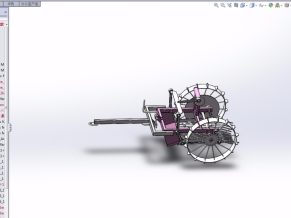
本文所设计摘果机是一种电机驱动轮式5轴摘果机,整体结构包括两自由度的移动载体和三自由度带夹持器的机械臂。摘果机主体使用铝板材料和工程塑料组装成摘果机机体,结构轻巧,方便在车体上增加模块。
移动底盘:
为了适应多变的开放式的苹果园地面环境,选用农用拖拉机式移动小车作为移动底盘。上面加装了主控电路板,采摘辅助装置,多种传感器,电源模块等。
传动结构:
主要包括机械手腰部,大臂,小臂部分。其转动均采用交流伺服电机作为驱动源,选用行星齿轮减速器对电机进行减速,同时提高最终的输出扭矩。直接选用电动推杆作为小臂伸缩的部件,在伸出杆的末端通过螺丝连接相应旋转法兰盘组件与末端执行器固连。末端执行器初步选定使用夹持机构将果实夹紧并采摘。
摘果机伺服驱动系统的作用是为摘果机提供动力并且控制其按照运动控制器的指令到达预定位置。因为交流伺服电动机具有无电刷和换向器、惯量孝适应于高速大转矩的优点,所以,摘果机的4个关节均采用交流伺服电动机作为驱动源。综合考虑使用性能和经济性,选用日本安川公司∑-Ⅱ系列交流伺服系统。
传动方式的选择:
摘果机关节需要的是低转速、大转矩的动力,而交流伺服电动机驱动系统输出的是高转速、低转矩的动力。因此,摘果机的腰关节、小臂和腕部均采用交流伺服电动机串接谐波减速器结合齿轮机构的传动方式。
为了增加传动稳定性,和控制灵活度,固增加连杆机构,辅助程序控制。连杆机构也是配以伺服电机进行控制。
末端执行器:
接近机构设计
由直线步进电动机的丝杠螺母结构、机架、滑块和导杆构成。
夹持机构
直线步进电动机的丝杠螺母结构、滑块和机架
旋转采摘机构
由安装于腕部的减速步进电动机、连接件Ⅰ和连接件Ⅱ构成。减速步进电动机机体通过连接件Ⅰ与机架Ⅱ固联,减速步进电动机输出轴通过连接件Ⅱ与机架Ⅰ固联,减速步进电动机旋转带动连接件Ⅱ相对连接件Ⅰ转动。减速步进电动机旋转角度通过设定脉冲数实现,电动机的最大扭矩可达6Nm。

A0-齿轮箱盖板

A0-大臂枝干2

A0-后轮轴

A0-驱动电机罩

A0-小臂伸缩板

A0-装配图

A1-电机固定盘

A1-小臂底板

A4-车面板固定架

A4-方向固定器支架

A4-驱动齿轮1

A4-轴端盖板






















")