三维
下肢假肢设计中,人工膝关节的设计是关键,因为它对整个下肢的运动性能影响最大,而且它的结构与功能最为复杂。要想研制出性能优良的假肢膝关节,需要人们做大量的工作,其中结构设计的工作是至关重要的,它是集思考、绘图、计算于一体的设计过程,对整个设计的成败起着重要作用。本文详细论述智能假肢研究意义、内容和方法,给出了仿生膝关节结构设计。
本文首先分析了人行走的运动特征,并从中得出了对人工膝关节的功能要求。其次,对人工膝关节的选型方案进行了比较论证。同时,还对膝关节的驱动方式进行了论述,选用智能MR阻尼器(Magneto-Rheological Damper)半主动控制的方式。之后对人工膝关节进行了具体的结构设计。
本次设计为假肢膝关节的结构设计提供了新思路。
关键词:异构双腿行走机器人;智能假肢;仿生腿膝关节;四连杆机构;磁流变阻尼器

局部视图

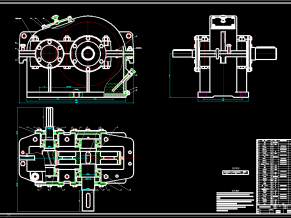
装配图

四视图

仿生膝关节上杆体

仿生膝关节下杆体

上限位块

轴

目录

说明书

说明书2