机械手
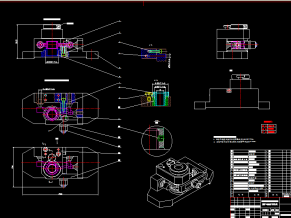
本模型为机械爪,采用三爪设计,抓取牢靠。通过伺服电机带动啮合齿轮实现机械手的360°旋转,通过液压缸的伸缩来实现机械手(爪)的张合。机械手(爪)上端采用活动铰链链接。本模型建模精巧,可供大家探讨学习!
机械手轴测图
建模细节图
机械手四视图
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至: