13-ΉήΉΑΆΦ-A0
‘Ύ÷–Ιζ÷Τ‘λ2025ΒΡ¥σ ±¥ζ±≥ΨΑœ¬Θ§÷Τ‘λ“ΒΒΡΗΏΥΌΖΔ’Ι‘ΎΈ“ΙζΩΤΦΦ¥¥–¬Νλ”ρœ‘ΒΟ÷ΝΙΊ÷Ί“ΣΘ§ΙΛ“ΒΜζΤς»Υ‘Ύ…ζ≤ζ÷Τ‘λ÷–≤ΜΫωΩ…“‘ΫβΖ≈άΆΕ·ΝΠΘ§Εχ«“‘ΎΦΪ¥σ≥ΧΕ»…œΧαΗΏ…ζ≤ζ–߬ Θ§Έ“Ιζ”÷“Μ¥ΈœΤΤπΝΥΙΛ“ΒΜζΤς»ΥΦΪΥΌΖΔ’ΙΒΡάΥ≥±ΓΘ
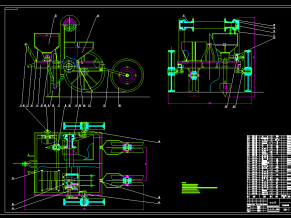
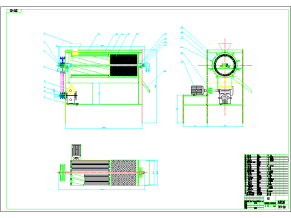
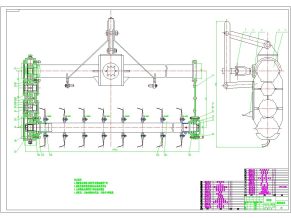
±Ψ¥Έ…ηΦΤ―ΓΧβΈΣΚΗΫ””ΟΜζ–Β ÷…ηΦΤΘ§÷ΊΒψ‘ΎΤδΫαΙΙ…ηΦΤΘ§Ψ≠Ιΐ≤ι‘ΡΕύΗωΚΗΫ”Μζ–Β ÷ΒΡ≥…ΆΦΦΑœύΙΊΈΡœΉΉ ΝœΘ§…ηΦΤ≥ω¬ζΉψΨΪΕ»«“‘Ύ“ΜΕ®ΖΕΈßΡΎΙΛΉςΒΡΜζ–Β ÷ΓΘ…ηΦΤΒΡΚΗΫ””ΟΜζ–Β ÷Ζ÷ΈΣΒΉΉυΓΔ¥σ±έΓΔ–Γ±έΓΔΆσ≤ΩΥΡΗω≤ΩΖ÷Θ§Ι≤”–5ΗωΉ‘”…Ε»ΓΣΓΣΖ÷±π «ΆσΉΣΓΔΆσΑΎΓΔ–Γ±έΉΣΓΔ¥σ±έΉΣΓΔ―ϋΉΣΓΘΆσΉΣ «Ά®Ιΐ“Κ―ΙΩΊ÷Τ“Κ―ΙΗΉΫχ––ΉΣΕ·Θ§ΆσΑΎ «Ά®ΙΐΒγΜζΚΆΦθΥΌΤς¥χΕ·Ν¥¬÷Ϋχ––¥ΪΕ·Θ§–Γ±έΓΔ¥σ±έΚΆΒΉΉυΒΡΉΣΕ·Ψυ”…Υ≈ΖΰΒγΜζΚΆ–≥≤®≥ί¬÷ΦθΥΌΤς¥χΕ·ΓΘ‘Ύ…ηΦΤΙΐ≥Χ÷–…φΦΑΒΫΥ≈ΖΰΒγΜζΓΔΦθΥΌΤςΓΔ“Κ―ΙΗΉΓΔ÷α≥–ΓΔΦϋΓΔœζ÷αΓΔ¬ίΕΛΒ»±ξΉΦΦΰΒΡ―Γ”ΟΘ§“≤…φΦΑΒΫ÷αΓΔ”Ά¬ΖΓΔΆβΩ«Β»≤ΩΖ÷ΒΡ…ηΦΤΦΑ–ΘΚΥΓΘ
…ηΦΤΆξ≥…ΚσΘ§Ε‘Μζ–Β ÷Ϋχ––ΝΥ‘ΥΕ·―ßΚΆΕ·ΝΠ―ßΖ÷ΈωΘ§Ζ÷±πΒΟ≥ωΜζ–Β ÷ΒΡ’ΐœρΚΆΡφœρ‘ΥΕ·―ßΖ÷ΈωΒΡΫβΘ§“‘±ψΫχ––œ¬“Μ≤ΫΒΡΩΊ÷ΤœΒΆ≥ΒΡ…ηΦΤΦΑ±ύ≥ΧΓΘ

ΚΗΫ””ΟΜζ–Β ÷…ηΦΤ-Ήή≥…ΆΦ

1-ΝψΦΰΆΦ-Ν¥¬÷-A4

2-ΝψΦΰΆΦ-“Κ―ΙΗΉΧε-A4

3-ΝψΦΰΆΦ-÷α-A3

4-ΝψΦΰΆΦ-–Γ±έΗυ≤Ω-A3

5-ΝψΦΰΆΦ-Ζ®άΦ-A3

6-ΝψΦΰΆΦ-ΧΉΆ≤-A3

7-ΝψΦΰΆΦ-¥σ±έ-A3

8-ΝψΦΰΆΦ-ΒΉΉυ-A3

9-ΝψΦΰΆΦ-ΜΊΉΣΧε-A3

10-ΝψΦΰΆΦ-≤ΜΙφ‘ρΩ«Χε-A2

11-≤ΩΉΑΆΦ-–≥≤®≥ί¬÷ΦθΥΌΤς-A1

12-≤ΩΉΑΆΦ- ÷Άσ-A1
…ξΟςΘΚΡΎ»ίά¥Ή‘”ΟΜß…œ¥ΪΘ§÷χΉς»®Ιι‘≠Ής’ΏΥυ”–Θ§»γ…φΦΑ«÷»®Έ ΧβΘ§«κ”κΈ“Ο«ΝΣœΒΘ§Έ“Ο«ΫΪΦΑ ±¥ΠάμΘΓ