

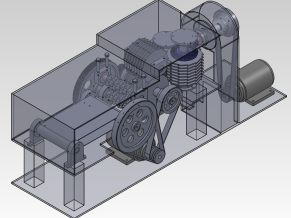
三维模型
对双足机器人的行走典型步态进行必要的分析比较,选择本次设计双足机器人的设计。对腿关节结构是使用电动机驱动关节运动还是使用传统的连杆机构(四杆机构、五杆机构、六杆机构等)驱动关节运动进行比较,同时对机构的自由度进行分析,选择一个自由度的斯蒂芬森型机构作为双足机器人的行走结构,并且引用了已经运用成熟的腿机构。考虑到驱动系统的安装,选择一个电动机驱动双足机器人的行走机构,减少了电动机的数目,减轻了双足机器人的负载,减少对腿关节运动的影响。

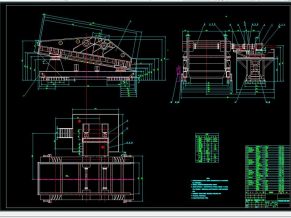
总装图

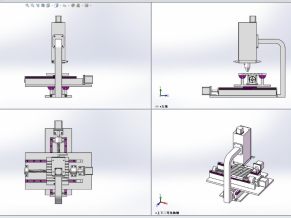
输出齿轮轴

蜗杆

蜗轮

连杆1

小齿轮

驱动圆盘

上箱体

输出轴

目录及字数统计
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!














")
")
")
")
")
")
")

")
")