ИэО¬ДЈРН
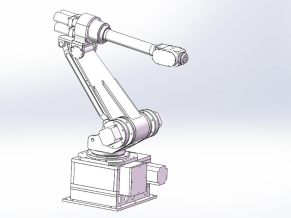
ОӘБЛДЬ№»ФЪГәҝуФЦәҰМШұрКЗНЯЛ№Гәіҫұ¬ХЁКВ№К·ўЙъәуЈ¬ҝмЛЩөДЧӘТЖәНЗАҫИКЬЙЛИЛФұЎЈЙијЖТ»ЦЦВДҙшКҪҫИФ®»ъЖчИЛЈ¬ҝЙТФККУҰёчЦЦёҙФУ»·ҫіЎЈКЧПИЙијЖБЛёчЦЦҫИФ®»ъЖчИЛРРЧЯЧ°ЦГөДУЕИұөгЈ¬өГіц¶аҪЪВДҙшКҪ»ъЖчИЛҝЙФЪёьјУёҙФУөД»·ҫіЦРРРЧЯЈ¬ЖдҙО·ЦОцБЛ¶аҪЪВДҙшФЪёчЦЦВ·ҝцПВРРЧЯөДНЁ№эРФЎЈҪУЧЕ¶ФРРЧЯөз»ъҪшРРСЎРНјЖЛгЈ¬Іў¶ФВДҙшј°ВДҙшВЦҪшРРПаУҰөДјЖЛгЈ¬өГіцЧоЦХөДВДҙшРРЧЯҪб№№ЎЈЧоЦХЙијЖіцБЛТ»ЦЦРВУұЎўЗбұгЎўҝ№іе»чөДВДҙшКҪТЖ¶Ҝ»ъЖчИЛЈ¬ёГ»ъЖчИЛДЬ№»ФЪ¶сБУөД»·ҫіәНёҙФУөДөАВ·МхјюПВ№ӨЧчЎЈҫӯ№эәПАнөДҪб№№ІјЦГәНЙијЖЈ¬»ъЖчИЛҫЯУРБјәГөД»·ҫіККУҰРФЎў»ъ¶ҜРФәНҝ№Т»¶ЁёЯ¶ИөДөшВдіе»чДЬБҰЎЈ

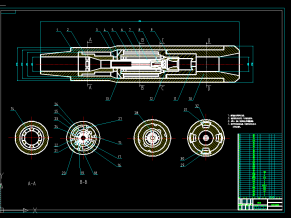
ДЪІҝҪб№№КУНј

ЧЬЧ°Нј

№М¶ЁЦб

өз»ъ№М¶Ё°е

РРЧЯІҝјюНј

јхЛЩПд»щ°е

КдіцЦб1

ЦбіРЧщ

ДҝВјј°ЧЦКэ
ЙкГчЈәДЪИЭАҙЧФУГ»§ЙПҙ«Ј¬ЦшЧчИЁ№йФӯЧчХЯЛщУРЈ¬ИзЙжј°ЗЦИЁОКМвЈ¬ЗлУлОТГЗБӘПөЈ¬ОТГЗҪ«ј°КұҙҰАнЈЎ