

змзАЭМ
вЛЁЂжївЊФкШнМАЛљБОвЊЧѓ
ЪдЩшМЦвЛИігУгкЪ§ПиГЕДВХдздЖЏЩЯСЯЕФЛњаЕЪжЃЌЛњаЕЪжЕФЛюЖЏЗЖЮЇЮЊЙЄзїАыОЖ2mЃЌЛизЊЗЖЮЇ0ЁуЁЋ360ЁуЃЌЙЄзїИпЖШ2mЃЌзЅЦ№ЕФзюДѓжиСПЮЊ40kgЃЛЖдгкжсРрСуМўЃЌзюДѓжБОЖ120mm,ЖдгкБ§РрСуМўЃЌзюДѓжБОЖЮЊ300mmЁЃдкЛюЖЏЗЖЮЇФкЃЌЛњаЕЪжФмЙЛзЅЦ№ЕиУцЩЯШЮКЮЮЛжУЕФЙЄМўЫЭШыЕНЮдЪНГЕДВЕФПЈХЬДІЁЃЖЏзїЕФСЌЙсКЭТпМЫГађгаPLCПижЦЁЃ
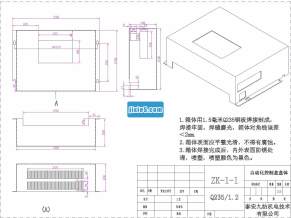
ЩшМЦЙЄзїСПЃК<1>змзАЭМжН,ЕиЛљЛљДЁЭМЃЌСуВПМўвЛРРБэЃЌБъзММўЛузмБэЃЌЭтЙКМўЛузмБэЃЛ
<2>ЩшМЦЫЕУїЪщЃЛ
<3>гЂЮФЗвыГЩККгя(5000зж)ЁЃ
ЖўЁЂжиЕубаОПЕФЮЪЬт
ЛњаЕЃЌЛњЙЙЃЌЛњаЕЪжЃЌМаОпЃЌШѕЕчПижЦЃЌPLCЃЌвКбЙЧ§ЖЏЛђепжДааЕчЛњЕФПижЦЃЌ
ЕиЛљЛљДЁ
Ш§ЁЂжївЊММЪѕжИБъ
зюДѓЛюЖЏАыОЖ2m
зюДѓЛюЖЏИпЖШ2m
ЛизЊЛюЖЏЗЖЮЇ0ЁуЁЋ360Ёу
зюДѓзЅШЁжиСП40kg
зЅШЁЙцИёАєСЯІе120mmЃЌХЬРрІе300mm
етДЮбаОПЕФФкШнЪЧЛњаЕЃЌЛњЙЙЃЌЛњаЕЪжЃЌМаОпЃЌШѕЕчПижЦЃЌPLCЃЌвКбЙЧ§ЖЏЛђепжДааЕчЛњЕФПижЦЃЌЕиЛљЛљДЁЕШЕФЩшМЦЁЃНЋЛњаЕЪжИїдЫЖЏЙЙМўЃЌШчЩьЫѕЁЂАкЖЏЁЂЩ§НЕЁЂИЉбіЕШЛњЙЙЃЌвдМАЪЪгкВЛЭЌРраЭЕФМаНєЛњЙЙЃЌЩшМЦГЩЕфаЭЕФЭЈгУЛњЙЙЃЌвдБуИљОнВЛЭЌЕФзївЕвЊЧѓЃЌбЁгУВЛЭЌЕФЕфаЭВПМўЃЌМДПЩзщГЩИїжжВЛЭЌгУЭОЕФЛњаЕЪжЁЃМШБугкЩшМЦжЦдьЃЌгжБугкИФЛЛЙЄзїЃЌРЉДѓСЫгІгУЕФЗЖЮЇЁЃЭЌЪБвЊЬсИпЫйЖШЃЌМѕЩйГхЛїЃЌе§ШЗЖЈЮЛЃЌвдИќКУЕиЗЂЛгЛњаЕЪжЕФзїгУЁЃИќЮЊжївЊЕФЪЧНЋЛњаЕЪжКЭШсаджЦдьЯЕЭГКЭШсаджЦдьЕЅдЊЯрНсКЯЃЌДгЖјИљБОИФБфФПЧАЛњаЕжЦдьЯЕЭГЕФШЫЙЄВйзїзДЬЌЁЃ
ЛњаЕЪжвЊЯёШЫЕФЪжвЛбљЭъГЩИїжжЖЏзїЪЧБШНЯРЇФбЕФЁЃвђЮЊШЫЕФЪжжИЁЂЪжГЄЁЂЪжЭѓЁЂЪжБлгЩЪЎОХИіЙиНкЫљзщГЩЃЌВЂОпга27ИіздгЩЖШЃЌЖјЩњВњЪЕМљжаЛњаЕЪжВЛашвЊетУДЖрздгЩЖШЁЃЯТУцАДЛњаЕЪжЫљОпгаЕФжїдЫЖЏКЭИЈжњдЫЖЏРДЗжЮіЦфздгЩЖШЁЃЪжБлКЭСЂжљЕФдЫЖЏГЩЮЊжїдЫЖЏЃЌвђЮЊЫќУЧФмИФБфзЅШЁЙЄМўдкПеМфЕФЮЛжУЁЃЪжЭѓКЭЪжжИЕФдЫЖЏГЩЮЊИЈжњдЫЖЏЃЌвђЮЊЪжЭѓЕФдЫЖЏжЛФмИФБфБЛзЅШЁЙЄМўЕФЗНЮЛЃЌЖјЪжжИЕФМаЗХдЫЖЏВЛФмИФБфЙЄМўЕФЮЛжУКЭЗНЮЛЁЃ
дкШЗЖЈСЫБЛзЅШЁЙЄМўЫљдкЕФПеМфЮЛжУЃЌМАНЋЙЄМўАсдЫЕНЙцЖЈЕФЮЛжУЪБЫљашвЊЕФдЫЖЏЁЃЕУжЊЮвУЧИФдьЕФЛњаЕЪжАќРЈСЫДѓБлЕФЛизЊКЭЩ§НЕСНИідЫЖЏЃЌЖјНЋвЊЩшМЦЕФЪжЭѓЕФздгЩЖШНіНіЪЧЮЊСЫХфКЯЪжБлЭъГЩЙЄМўЕФдЄЖЈзАаЖЗНЮЛвЊЧѓМгвддіЩшЕФЁЃ
етДЮЩшМЦЕФЛњаЕЪжЃЌЦфЪжБлЕФдЫЖЏгЩСНИіжБЯпдЫЖЏКЭвЛИіЛизЊЫљГЩЃЌМДбиXжсЕФЩьЫѕЃЌбиZжсЕФЩ§НЕКЭШЦZжсЕФЛизЊЁЃетжжзјБъаЭЪНЕФЛњаЕЪжГЩЮЊдВжљзјБъЪНЛњаЕЪжЁЃЫќгыжИНЬзјБъЪНЯрБШНЯЃЌеМЕиУцЛ§ДѓЖјЛюЖЏЗЖЮЇДѓЃЌНсЙЙНЯЮЊМђЕЅЃЌВЂФмДяЕННЯИпЕФЖЈЮЛОЋЖШЃЌвђДЫЕУЕНЙуЗКЕФгІгУЁЃ
ЦфжївЊММЪѕжИБъЮЊЃК
зюДѓЛюЖЏАыОЖ2mзюДѓЛюЖЏИпЖШ2mЛизЊЛюЖЏЗЖЮЇ0ЁуЁЋ360ЁузюДѓзЅШЁжиСП40kg
зЅШЁЙцИёАєСЯІе120mmЃЌХЬРрІе300mmЁЃ
Ш§ЁЂжївЊЬиЩЋМАЙЄзїНјЖШ
ЮвУЧетДЮЩшМЦжївЊЪЧеыЖдДЫЛњаЕЪжЃЌЖјЧвЛЙвЊЖдЛњаЕЪжЕФећЬхВМОжМАЙЄзїдРэКЭЙ§ГЬзівЛаЉНщЩмЁЃдкЭтаЭЩЯЃЌЮвУЧвЊНтОіЕФЮЪЬтжївЊЪЧЮвУЧЩшМЦГіРДЕФЪЕЬхвЊКЭЪЕЮяЯрЭЌЛђЯрНќЁЃдкДѓЕФЗНУцЃЌвЛИіЛњаЕЪжПЩвдЗжЮЊДѓБлЁЂаЁБлКЭЪжзІЪжЭѓЕШВПЗжЁЃЖјЪжЭѓВПЗжЪЧЮвУЧЫљжиЕувЊЧѓЕФЃЌЖдЦфжаЕФУПвЛИіСуМўЁЂВПМўМАзщКЯЬхЕФГпДчКЭаЮЬхЖМгабЯИёЕФвЊЧѓЃЌЖјЧвУЛгаЪжЭѓЃЌШЁЖјДњжЎЕФЪЧвЛИіЕѕЙГЃЌЮЊСЫНЋЦфИФдьГЩЮЊПЩздЖЏзЅШЁЕФЛњаЕЪжЃЌУПИіСуМўЕФХфКЯЖМвЊКмПМОПЁЃЖјгЭТЗЕФВМжУвВвЊКЯРэЁЃећЬхвЊећЦыУРЙлЁЃЛњЙЙЪЕгУЧвОМУЁЃЙЄзїНјЖШ2009.5.11ЁЋ2009.5.15ЕїбаЁЂВнЭМЁЂЗНАИЃЌ2009.5.15ЗНАИЦРЩѓЃЌ2009.5.15ЁЋ2009.5.20МЦЫуЁЂзмЬхВМОжЁЂдРэЃЌ2009.5.21ЁЋ2009.5.30ЛцЭМЁЂЩшМЦЃЈСуВПМўЃЉЃЌ2009.5.30ЁЋ2009.6.5ећРэЫЕУїЪщЁЂгЂЮФЗвыЃЌ2009.6.5ЁЋ2009.6.10зМБИД№БчЃЈгЂгяПкгяЁЂздЮвНщЩмЃЉЁЃ

ЮФМўСаБэ

жїжс

ЛизЊИзЯфЬх

ЩьЫѕгЭИз
ЩъУїЃКФкШнРДздгУЛЇЩЯДЋЃЌжјзїШЈЙщдзїепЫљгаЃЌШчЩцМАЧжШЈЮЪЬтЃЌЧыгыЮвУЧСЊЯЕЃЌЮвУЧНЋМАЪБДІРэЃЁ



















")




