

数控机床装夹装置
【含CAD全套】数控机床自动夹持搬运装置
摘要
数控机床上专用于工件和零件的夹持和自动运转的装置,其运动自由度多,且有严格的动作顺序要求。用液压驱动可实现动作自动循环,利于自动化和高效率等要求。机械手用于各种工艺装备上,其中包括组成柔性自动化系统的数控金属切削机床。工业机器人装备有自动可换夹持装置,其中双夹持器的装置用来保证同时操作毛坯和在加工的零件。本设计主要针对机械手的液压系统,确定液压系统中各个部分的功能,并且对各种执行元件进行计算分析,最终完成液压原理图。
目录
1概述……………………………………………………………………………………… 1
1.1课题背景……………………………………………………………………… 1
1.2课题内容………………………………………………………………………… 1
1.3课题的意义………………………………………………………………………… 2
1.4课题的创新点………………………………………………………………………… 2
2机械手的功能设计…………………………………………………………………… 2
2.1机械手液压系统的各部分功能…………………………………………………………… 2
2.2机械手液压系统的功能综合…………………………………………………………5
2.3机械手电磁铁动作循环表…………………………………………………………… 6
2.4机械手液压系统方案设计……………………………………………………… 6
3机械手液压系统机构设计计算……………………………………………………… 6
3.1负载分析………………………………………………………………………………… 6
3.2液压马达的负载…………………………………………………………………………9
3.3执行元件主要参数的确定…………………………………………………………………10
3.4计算液压缸各工作阶段的工作压力、流量、功率………………………………………11
3.5拟定液压原理图………………………………………………………………………11
3.6选择液压元件………………………………………………………………………………12
3.7液压缸基本参数的确定……………………………………………………………………14
3.8液压缸结构强度计算和稳定校验…………………………………………………………17
3.9液压传动用油的选择………………………………………………………………………22
4验算系统液压性能………………………………………………………………………23
4.1压力损失的验算及泵压力的调整…………………………………………………………23
4.2液压系统发热和温升验算…………………………………………………………………26
4.3滤油器的选择………………………………………………………………………………26
结论…………………………………………………………………………………… 30
致谢…………………………………………………………………………………… 31
参考文献………………………………………………………………………………32

导向套

活塞杆

液压缸

油箱装配图

运动简图




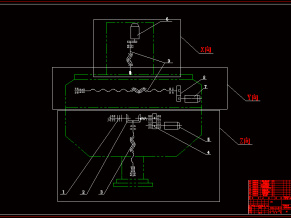


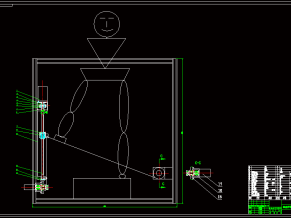






3个自由度搬运机械手的设计")

")
")
")
")
")
")
")
")