

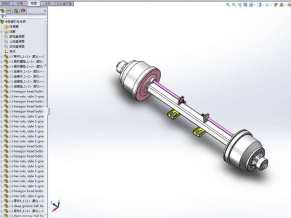
三维截图
本次设计的重心驱动式球形滚动机器人采取的方桉是:采用外观为圆形的壳体作为机器人的主体,内部装有直流电机,通过底部的电机转动带动上部分的电机转动从而致使失重板的倾斜从而使得我的机器人的运动功效得以实现
已知整个重心驱动式球形滚动机器人的总重量160KG,其他重量40KG,我们取总重量为200Kg,移动速度为1~2r/min。
根据计算和特性曲线以及电机基本参数表,我们选用电机型号为160BL-4030H1-LK-B,电机额定功率为0.1KW,额定转矩为7.62N.m,最高的转矩是9N.m,额定的转速是3000r/min
摘要
机器人工业是一个国家的重要产业,机器人工业的发展无时不刻都在影响着国家经济的发展,人类的进步离不开机器人工业的发展。在全球经济发展的大环境下,中国各个行业被其他国家的先进技术影响的同时,越来越多的外国企业和品牌传播到中国已经成为现实。在新的市场需求的推动下,对重心驱动式球形滚动机器人进行改良和优化是当务之急。有重心驱动式球形滚动机器人研究企业对该机器人的安全指标的有着一定生产的严格要求。在生产机器人的企业,充分考虑到在机器人运行中可能出现的问题,从而减少噪声污染引起的振动或不当操作设备的现象等。国内重心驱动式球形滚动机器人的研发及制造要与全球号召的高效经济、安全稳定主题保持一致。重心驱动式球形滚动机器人的发展与人类社会的进步和科学技术的水平密切相关。
本文运用大学所学的知识,提出了重心驱动式球形滚动机器人的结构组成、工作原理以及主要零部件的设计中所必须的理论计算和相关强度校验,构建了重心驱动式球形滚动机器人总的指导思想,从而得出了该重心驱动式球形滚动机器人的优点是高效,经济,运行平稳的结论。
关键词:重心驱动式球形滚动机器人;结构;滚动;经济
目录
摘要i
ABSTRACT ii
目录iii
1绪论1
1.1课题来历与研究的目的以及意义1
1.2机器人发展概况4
1.3本课题研究的内容6
1.4 Solidworks设计基础8
1.4.1草图绘制9
1.4.2基准特征,参考几何体的创建10
1.4.3拉伸、旋转、扫描和放样特征建10
1.4.4工程图的设计10
1.4.5装配设计11
2重心驱动式球形滚动机器人总体方桉结构的设计12
2.1重心驱动式球形滚动机器人机构的总体方桉图12
3机械传动的设计计算17
3.1直流伺服电机的选型计算18
3.2传轴的设计计算19
3.3轴承的设计计算20
结论20
致谢21
参考文献22
附录一23
附录二28

A0-重心驱动式球形滚动机器人

A3-连接轴

A3-实重板

A3-支架

A4-传动轴

A4-滚轮

A4-轴承座1

A4-轴承座2













")
")
")
")

")
")


