

三维图(1)
本文设计了一个五自由度串联机械手,首先通过计算得到执行端所需要的驱动力矩,再以此为依据选出该关节所需的减速器和伺服电动机,设计出外壳和关节的连接结构,绘制3D图,通过软件的测量求出设计好的部分重心,求出下一个关机所需的驱动力矩,选出所需的减速器和伺服电动机,以此类推最终完成总体设计,并且绘制了串联五自由度机械手的工程图。
关键词:五自由度串联机械手总体设计伺服电动机
Abstract
This paper designed a five DOF serial manipulator. First of all, through the calculated execution end driving torque, and this is the basis to select reducer and servo motor which the joint required, then design the shell and joint connection structure by 3D software . through the measurement , design part of the center of gravity for a shutdown required driving torque, select the desired speed reducer and servo motor, and so on. And finalcomplete the overall design,and made a five DOF serial manipulator engineering drawing.
Key words: 5-dof serial manipulator overall design Servo motor
目录
摘要I
Abstract II
第1章绪论1
1.1概述1
1.1.1机器人定义1
1.1.2机械手的应用简况1
1.1.3发展趋势1
1.2研究内容2
第2章搬运机械手结构设计3
2.1机械手的组成3
2.1.1执行机构3
2.1.2驱动机构3
2.2机械手的分类3
2.3机械结构设计与分析4
2.4传动、驱动方式的分析与选择4
第3章机器人手部的设计6
3.1手部设计要求6
3.2驱动力的计算6
3.3两支点回转式钳爪的定位误差的分析8
3.4手抓夹持范围计算8
第4章总体设计10
4.1总体设计参数10
4.2设计原理10
4.3传动设计10
4.4关节处设计11
4.5手臂设计12
4.6整体设计13
第5章静力矩估算与电机、减速器的选择14
5.1电机、减速器的选择14
5.1.1手腕转动14
5.1.2手臂俯仰16
5.1.3小臂俯仰17
5.1.4大臂俯仰19
5.1.5大臂转动21
5.2手臂的校核计算22
5.3轴的校核23
致谢27
参考文献28
第1章绪论
1.1概述
1.1.1机器人定义
机器人、工业机器人、机械手,这些名词术语代表着不同的事物类别,但在概念上没有明确的区分,说明它们又有相似之处。参阅相关资料,世界各国对于这些名词术语至今还没有做出统一的明确定义,只有国际标准化组织以及各国工业协会提出的相关定义。美国机器人工业协会提出的定义:机器人是“一种用于移动各种材料、零件、工具或专用装置的,通过可编程序动作来执行种种任务的,并具有编程能力的多功能机械手”。尽管这一定义较实用,但并不全面。国际标准化组织的定义:“工业机器人是一种具有自动控制的操作和移动功能,能完成各种作业的可编程操作机”[1-3]。关于我国机器人的定义,蒋新松院士曾建议把机器人定义为“一种拟人功能的机械电子装置”工业机器人与机械手的主要区别是前者具有独立的控制系统,可通过编程方法实现动作程序的变化;而后者则只能完成简单的搬运、抓取及上、下料工作,一般作为自动机或自动线上的附属装置,其程序固定不变[4-5]。由此可见,不论如何进行定义,它们都有一个共性,即:都是一种集机构学、控制学、计算机学、信息学和传感技术学等多学科于一体的自动化装置。
1.1.2机器人的应用简况
在现代工业中,生产过程的机械化、自动化已成为突出的主题。在机械工业中,加工、装配等生产是不连续的。专用机床是大批量生产自动化的有效办法,程控机床、数控机床、加工中心等自动化机械是有效解决多品种小批量生产自动化的重要办法[10-12]。
1.1.3发展趋势
目前国内工业机械于主要用于机床加工、铸锻、热处理等方面,数量、品种、性能方面都不能满足工业生产发展的需要[8-9]。
因此,国内主要是逐步扩大机械手应用范围,重点发展铸锻、热处理方面的机械手,以减轻劳动强度,改善作业条件。在应用专用机械手的同时,相应地发展通用机械手,有条件的还要研制示教式机械手、计算机控制机械手和组合式机械手等。
将机械手各运动构件,如伸缩、摆动、升降、横移、俯仰等机构,以及适于不同类型的夹紧机构,设计成典型的通用机构,以便根据不同的作业要求,选用不用的典型部件,即可组成各种不同用途的机械手。

三维图(2)

三维图(3)

大臂支架

等轴侧

底座

二轴减速机入力轴

二轴减速器

手爪座

腕关节支架

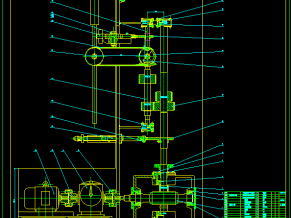
五自由度机械手装配图

小臂支架

腰部支架

一轴减速机入力轴

一轴减速器

轴

肘部连接轴

肘关节支架


![操纵拨叉加工工艺及钻M12螺纹孔夹具设计[版本2]-WORD工序卡](http://img.jixie5.com/d/file/2021/12/08/d393ae9d6b0d06ffffcc3fa77cdb4786.png@!l)













――x-t通用格式")








