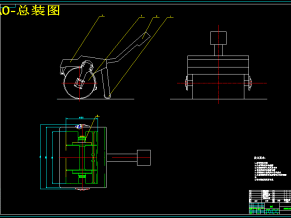
装配图-A0
本课题要求设计一款小型机械手,可以灵活深入校园树丛中拾捡垃圾,以减少保洁人员的劳动强度,垃圾重量不超过200g。
本文首先向分析了垃圾拾捡机械手的研究现状提出符合本次设计要求的方案,接着针对机械手臂各个部分进行详细的设计与校核并且对PLC控制系统进行了设计,最后用CAD软件绘制了垃圾拾捡机械手的装配图和主要零件图。
关键字:垃圾拾捡,机械手,设计校核
Abstract
The manipulator is also known as the automatic hand can imitate the human hand and arm of some of the action function, in order to grasp the fixed program, handling objects or operating tools automatic operation device. It can replace human labor to realize the mechanization and automation of production, can operate in order to protect the personal safety in harmful environment, so it is widely used in machinery manufacturing, metallurgy, electronics, light industry and atomic energy and other departments.
This paper first analyzes the current situation to study the four degrees of freedom cylindrical coordinate manipulator is proposed in accordance with the design requirements of the program, and then for each part of the mechanical arm was designed and checked in detail and PLC control system are analyzed in detail and design, finally using CAD software to draw the assembly drawing of cylinder with four degrees of freedom coordinate type mechanical arm and the main parts of the map.
Keywords: Four degrees of freedom, Cylindrical coordinates, Manipulator, Arm
目录
摘要I
Abstract II
第1章绪论1
1.1研究背景及意义1
1.2国内外机械手的研究及发展现状1
1.3主要内容2
第2章总体方案设计3
2.1设计要求3
2.2结构及原理分析3
2.3总体方案设计3
2.3.1驱动方案选择3
2.3.2移动形式的确定3
2.3.3捡拾机构设计3
2.3.4机械臂、机身、机座方案4
第3章动力及驱动机构设计6
3.1电动机的选择6
3.1.1扭矩的计算6
3.1.2启动矩频特性校核7
3.2回转减速器的选择7
3.3回转主轴及轴上零件的设计与校核8
3.3.1尺寸与结构设计计算8
3.3.2强度校核计算8
3.3.3轴上零件的选择与校核10
3.4气缸的选择12
3.4.1安装方式12
3.4.2作用力大小12
3.4.3活塞行程12
3.4.4汽缸型号选择13
第4章执行机构的设计14
4.1大臂、小臂的设计14
4.1.1受力分析14
4.1.2内力图的绘制21
4.1.3宽度、钢板厚度的选取22
4.1.4危险截面处高度计算22
4.2连接销轴的校核23
4.3抓爪的设计24
4.4移动小车的设计25
4.5回转底座的设计26
第5章控制系统设计27
5.1 PLC控制简介27
5.2机械手的控制27
总结30
参考文献31
致谢32
第1章绪论
1.1研究背景及意义
随着经济的快速发展和人民生活水平的日益提高,垃圾排放量与日俱增,对环境的压力越来越大,特别是校园这种人口密集的地方,每天都在制造大量的垃圾,如废纸、瓜皮、餐盒包装等,使得校园垃圾特别地多,为了保持校园的干净整洁,需要花费大量的人力物力和财力。如果设计一个校园垃圾拾捡手,就可以解决这些问题。
这次的设计,是对我大学4年所学的知识进行一次系统的应用和巩固,对课本知识的重新梳理和完善,将4年所学知识整合起来,融汇贯通,以达到经过四年的量的积累后通过设计得到质的提升的目的。这次的设计,是我大学里最具挑战性的项目,完成这次设计,能使我的综合能力有很大的提升,使我以后的工作提供一个可靠的经验和基础。
1.2国内外机械手的研究及发展现状
目前国内机械于主要用于机床加工、铸锻、热处理等方面,数量、品种、性能方面都不能满足工业生产发展的需要。所以,在国内主要是逐步扩大应用范围,重点发展铸造、热处理方面的机械手,以减轻劳动强度,改善作业条件,在应用专用机械手的同时,相应的发展通用机械手,有条件的还要研制示教式机械手、计算机控制机械手和组合机械手等。同时要提高速度,减少冲击,正确定位,以便更好的发挥机械手的作用。此外还应大力研究伺服型、记忆再现型,以及具有触觉、视觉等性能的机械手,并考虑与计算机连用,逐步成为整个机械制造系统中的一个基本单元。
国外机械手在机械制造行业中应用较多,发展也很快。目前主要用于机床、横锻压力机的上下料,以及点焊、喷漆等作业,

大臂-A2

底座-A1

回转架-A2

回转主轴-A3

小臂-A2








![电池包装送料机构设计[三维PROE][含CAD图纸+文档资料]](http://img.jixie5.com/d/file/2019/04/04/bc4eef2226fdb0c75ba56a81306ecd71.jpg@!l)