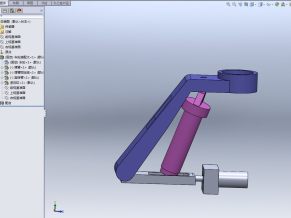
A0-装配体
本次设计的题目是机械手夹持器的设计,该机械手夹持器采用压缩弹簧的张力实现该机械手夹持器的张开,气缸提供驱动机械手夹爪开合的动力。
本文所设计的机械手夹持器所配套的机械手,具有全程悬浮功能,模块化结构和符合人机工程学操作原理的特性能够更好的满足客户需求。现有产品,主机负载能力可从80Kg~350Kg(含夹具);提升有效行程可达1400mm,最大工作半径可达R3m;也可通过铺设滑轨来实现覆盖范围的有效扩展,以满足不同的现场工作情况。
已知整个机械手夹持器的总重量50KG,其他重量150KG,我们取总重量为200Kg,移动速度为1~2r/min。
根据计算和特性曲线以及电机基本参数表,我们选用电机型号为160BL-4030H1-LK-B,电机额定功率为0.2KW,额定转矩为7.62N.m,最大转矩为9N.m,额定转速为3000r/min。
目录
摘要...............................................................I
Abstract .......................................................II
1绪论...............................................................1
1.1本课题研究的内容...............................................1
1.2国内外发展状况...............................................2
1.3机械手的组成和分类...............................................5
2机械手夹持器结构的设计.......................................11
2.1机械手夹持器的总体方桉图.......................................12
2.2机械手夹持器的工作原理.......................................13
2.3装配机械手的功能特点.......................................14
2.4机械部分的设计计算.......................................16
2.4.1电机在选型设计...............................................17
2.4.2压缩弹簧的选型计算.......................................19
2.4.3螺栓的选型计算...............................................22
3机械手夹持器中关键零部件的强度计算与校核.......................24
3.1弹簧的强度计算与校核.......................................25
3.2套筒的强度计算与校核.......................................27
结论...............................................................28
致谢...............................................................29
参考文献.......................................................30

A1-夹爪A

A1-夹爪B

A3-安装板

A4-拔块

A4-拔块套

A4-弹簧片

A4-定位钉

A4-压板

A4-压缩弹簧

A4-压缩橡胶