

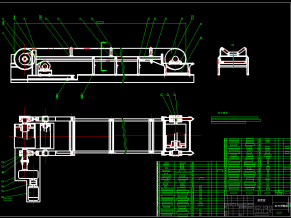
A0 总图
本文阐述了机械手的发展历史,国内外的应用状况,及其巨大的优越性,提出了具体的机械手设计要求和进行了总体方案设计和各自由度的具体结构设计、计算。
本课题模拟了实际工业生产系统,课题将设计一个龙门机械手,将用于袋装物料转移运送,从一个位置移动到另外一个位置。工业机械手对于提高和确保产品质量,提升生产的效率,改善工人的工作条件和快速更新产品起着非常重要的作用。工业机械手技术结合了多们学科的知识。包含机构学、计算机、控制论、信息和传感技术、人工智能、仿生学等。它是当代十分活跃,应用非常广泛的领域。
机械手是指能模仿人手和臂的某些动作功能,用以按固定程序抓娶搬运物件或操作工具的自动操作装置。主要由执行机构、驱动机构和控制系统三大部分组成。它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
数控龙门码垛机械手能部分地代替人工操作,能按照生产工艺的要求,遵循一定的程序、时间和位置来完成钢材的传送和装卸。它可在空间抓、放、搬运物体等,动作灵活多样,广泛应用与工业生产和其他领域内。应用plc控制机械手能实现各种规定的工序动作,不仅可以提高产品的质量与产量,而且对保障人身安全,改善劳动环境减轻劳动强度,提高劳动生产率,有着十分重要的意义。

A3 丝母座(Z轴)

A4 法兰盖

A4 内隔套

A4 外隔套

A4 轴承盖

半联轴器I A4

半联轴器II A4

说明书目录1

说明书目录2

说明书字数

说明书总览

凸缘联轴器A4

轴承闷盖A4

轴承通盖A4
























")