三维模型
本课题设计的设计内容是完成多自由度直角坐标型码垛机器人本体结构设计,此码垛机器人有四个自由度,用于抓取袋装粉末状物体,能够快速紧凑地码垛。可以通过快速替换机械抓手和重新编程对不同大小的物体进行快速码垛,可以适应不同的码垛对象,应用广泛。
传动部件模型
Z旋转轴
连接座
旋转轴连接座
Y轴螺母座
齿轮轴
抓手部件
目录及字数
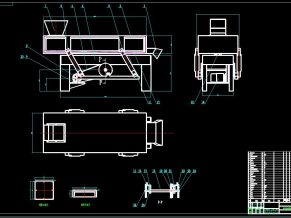
总装图
申明:内容来自用户上传,著作权归原作者所有,如涉及侵权问题,请与我们联系,我们将及时处理!
分享至:



























")

")
")
")
")
")
")
")
")